360° motorcycle stand GSXF
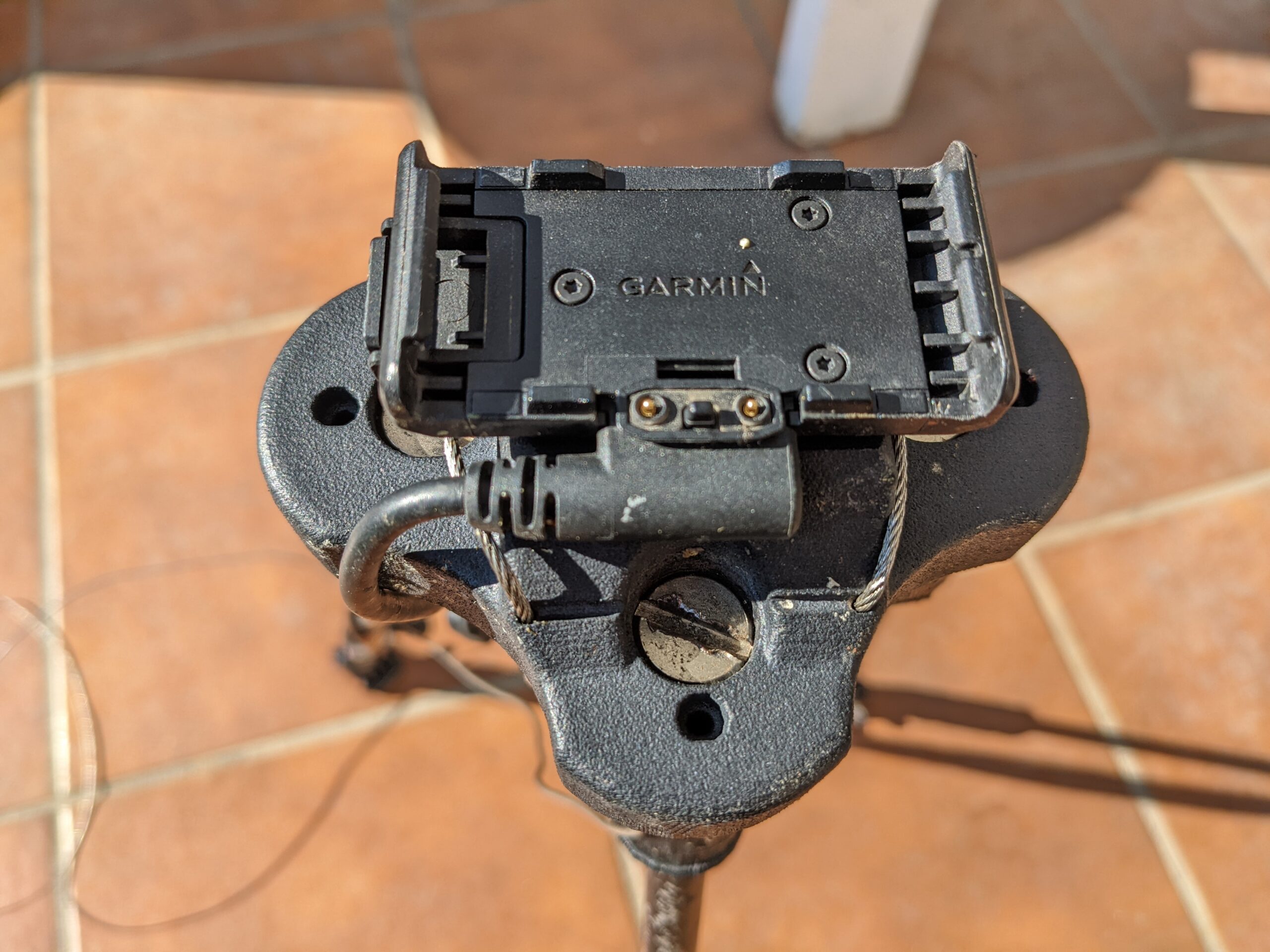
I am excited to present my innovative detachable tripod, specifically designed for motorcycles. My tripod easily mounts onto the rear luggage rack of your motorcycle and provides a secure platform for mounting a 360-degree camera. This allows you to capture breathtaking footage of your journeys from every angle.
The tripod is thoughtfully designed with 3D-printed components and sturdy aluminum rods, ensuring a robust and durable assembly. It can be disassembled in just 5 minutes, making it incredibly convenient for on-the-go adventurers. What sets my design apart is the non-permanent mounting system, which ensures that the device can easily detach in case of an accident, prioritizing the safety of the motorcyclist.
After conducting initial printing tests at home, I have used professional laser printing technology to guarantee the system’s safety and durability. The system has undergone extensive testing, proving its usability and long-lasting performance.
Discover a new way to document your motorcycle adventures with my detachable 360-degree camera tripod. Capture every breathtaking moment from a truly unique perspective.

Multimedia information
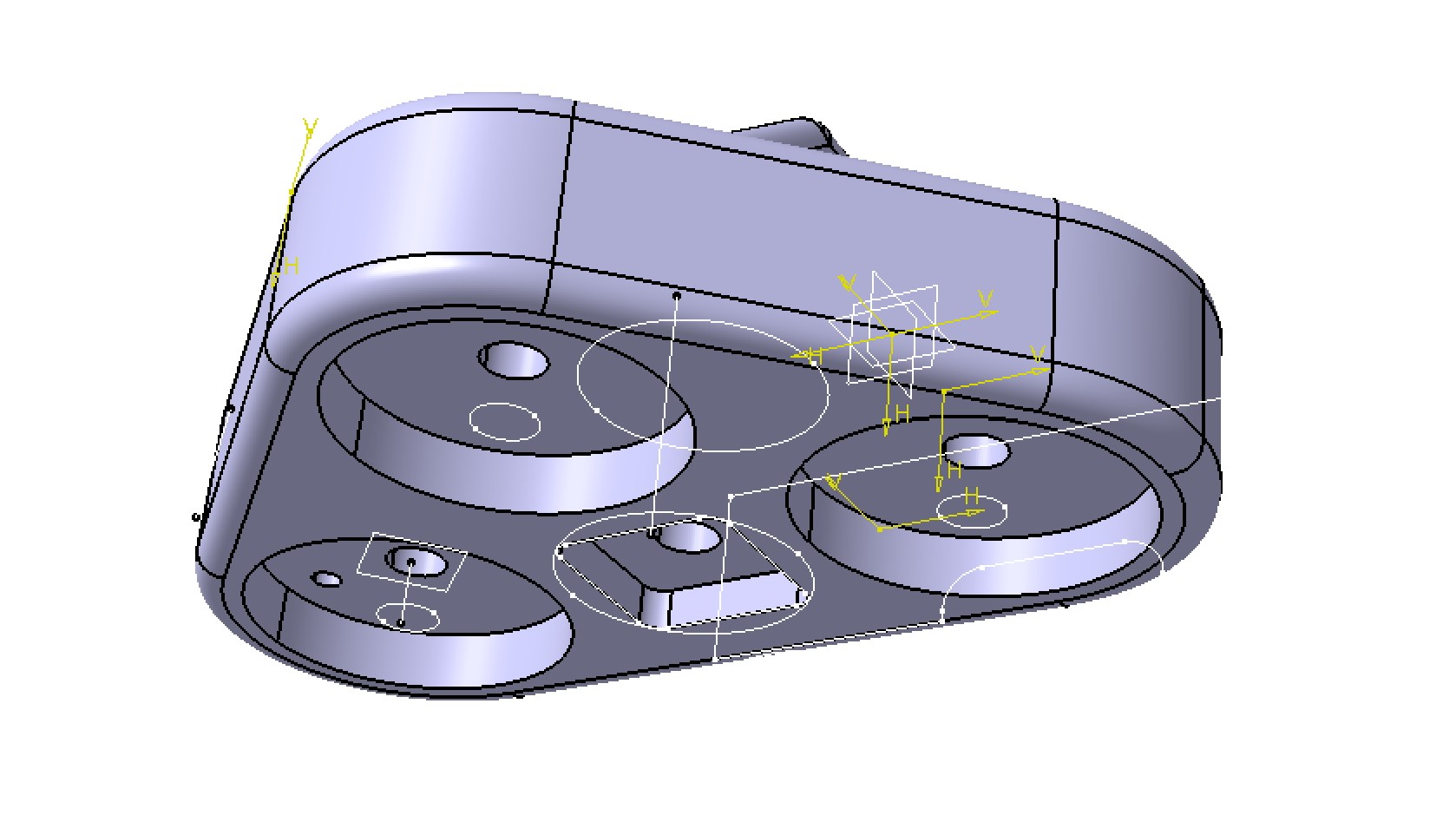
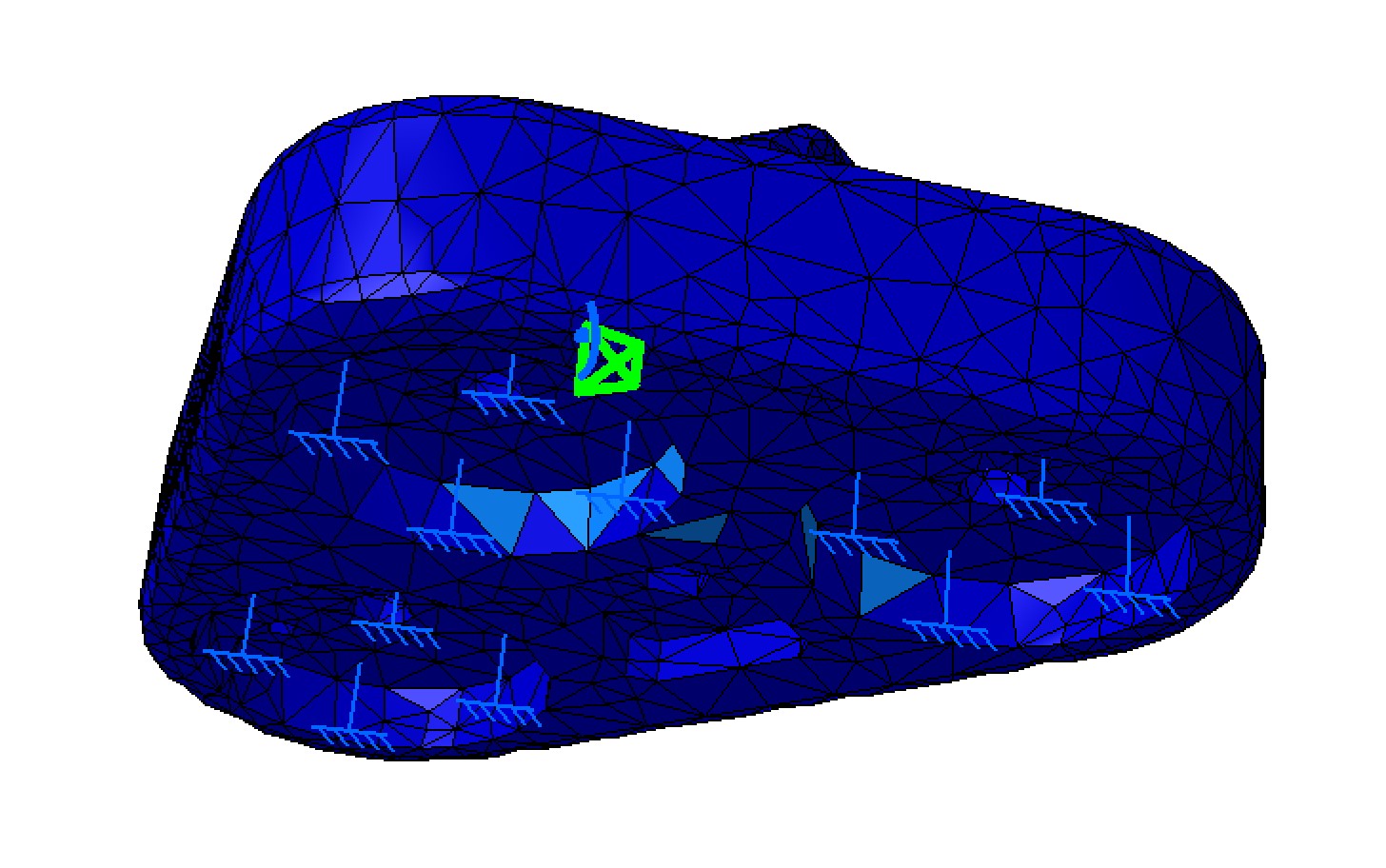
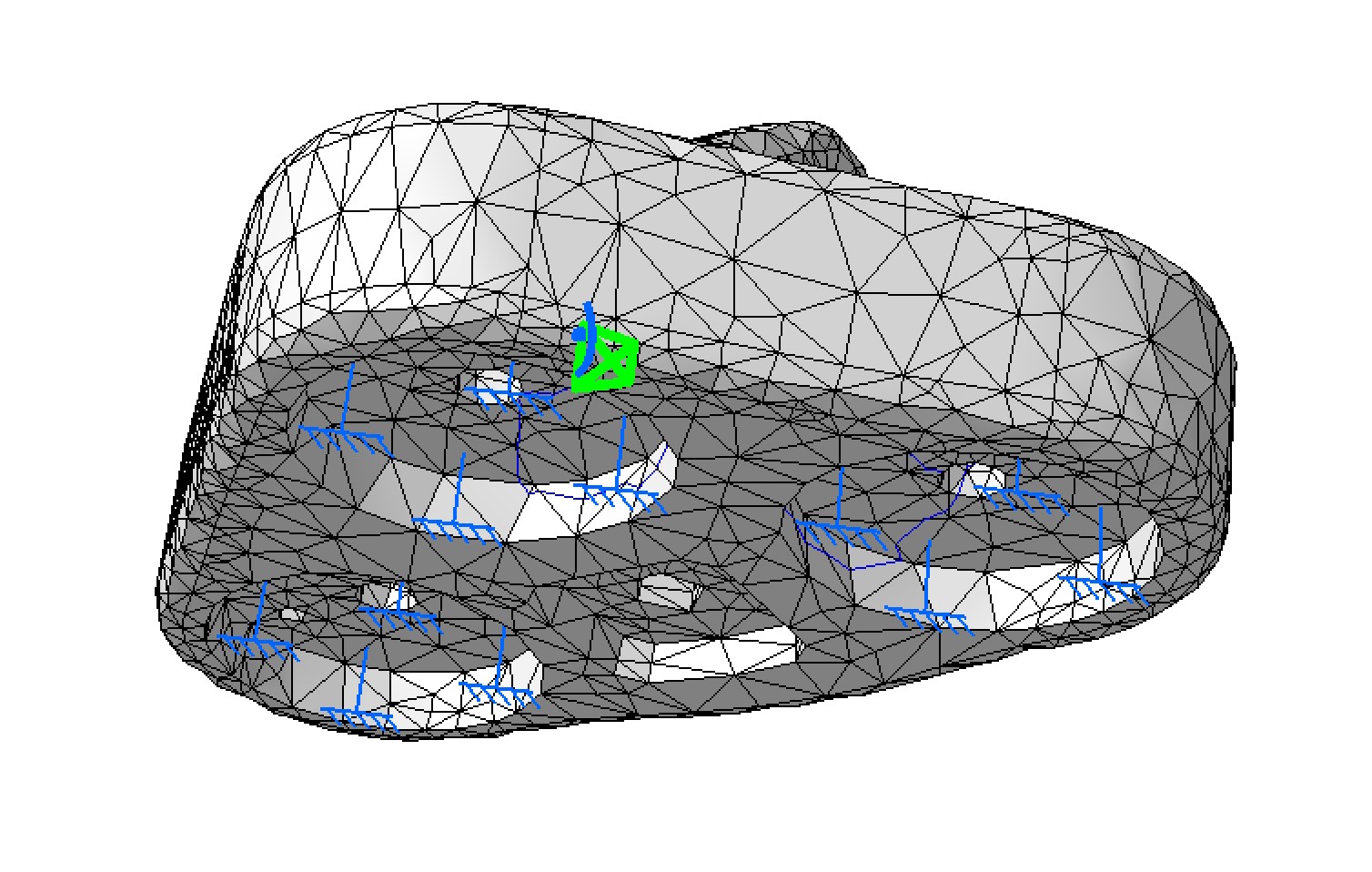
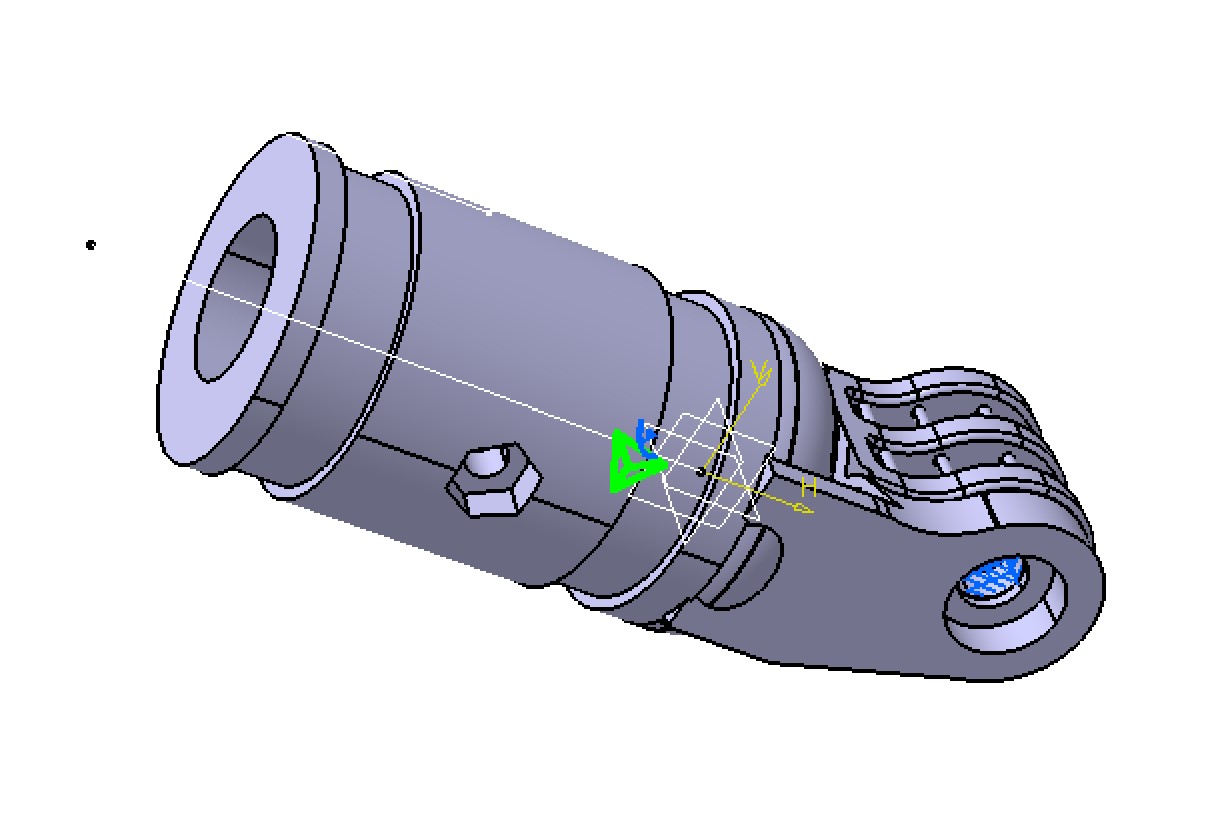
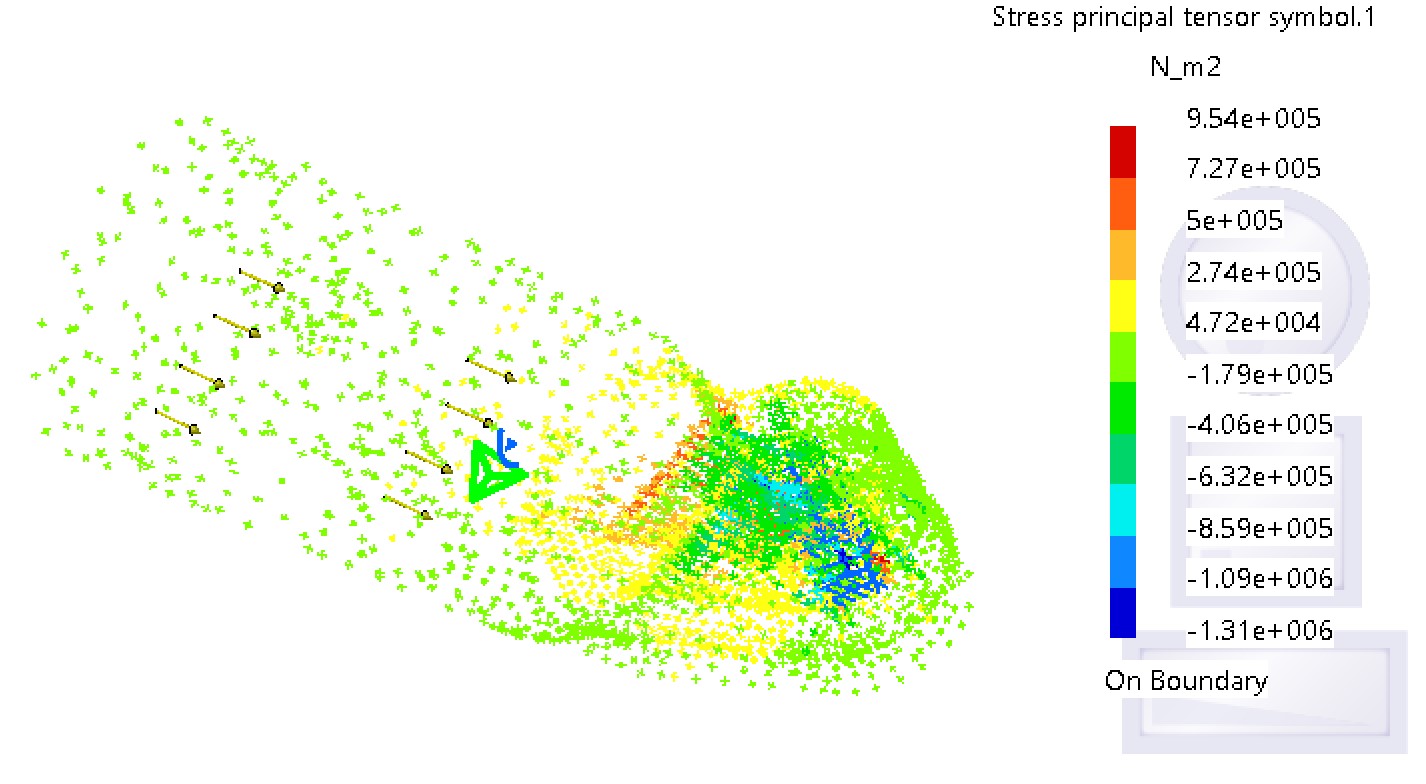
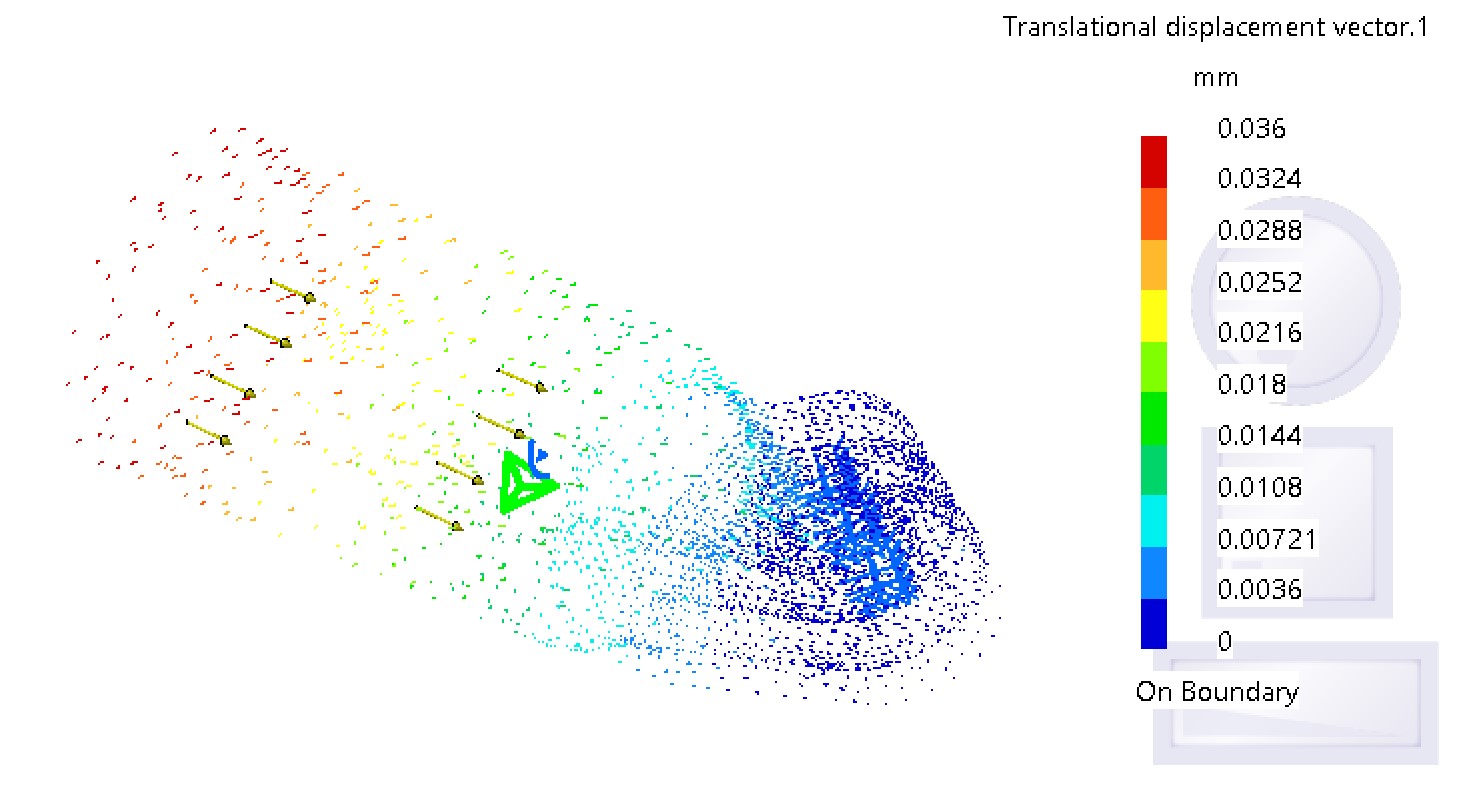
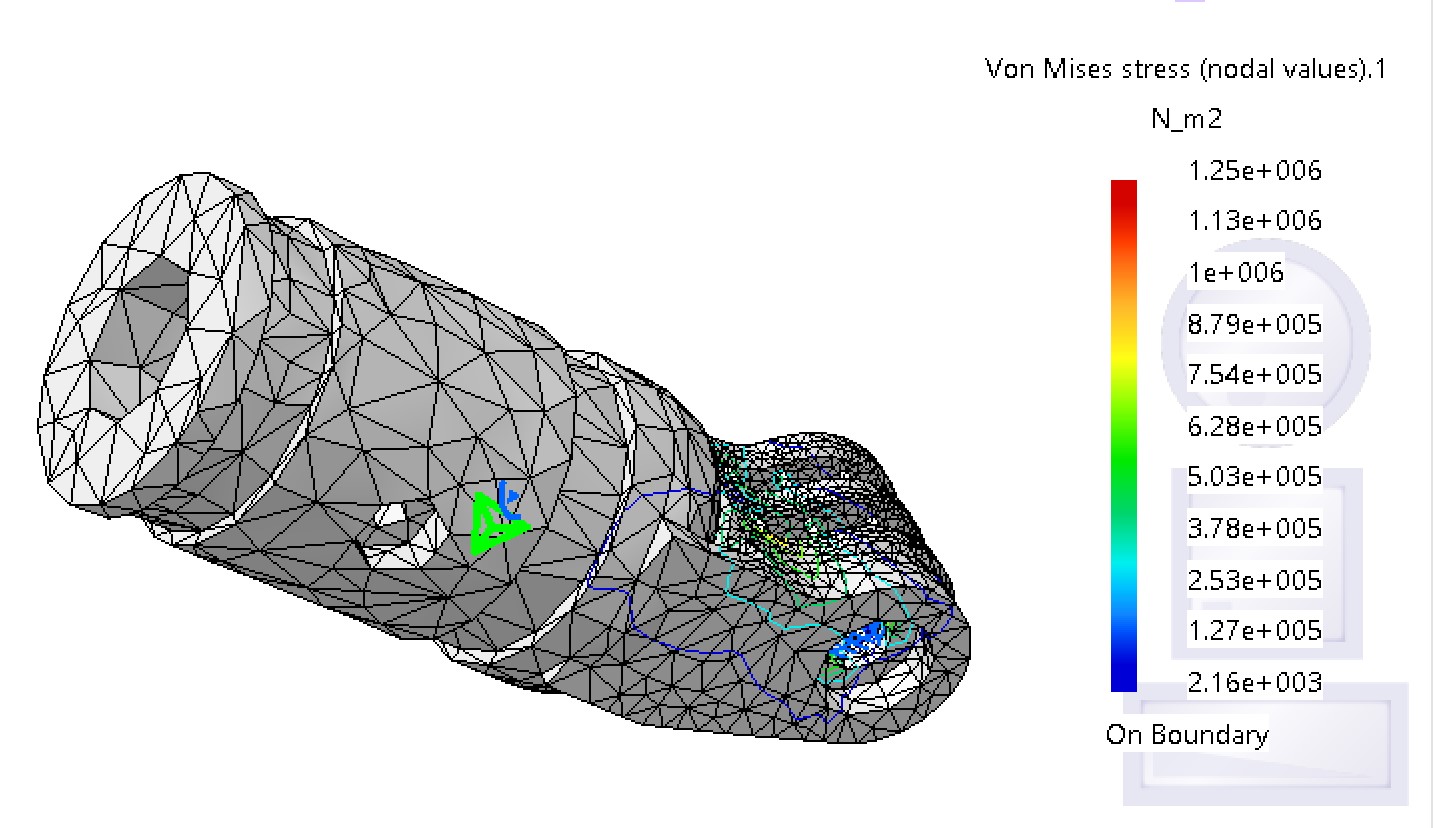
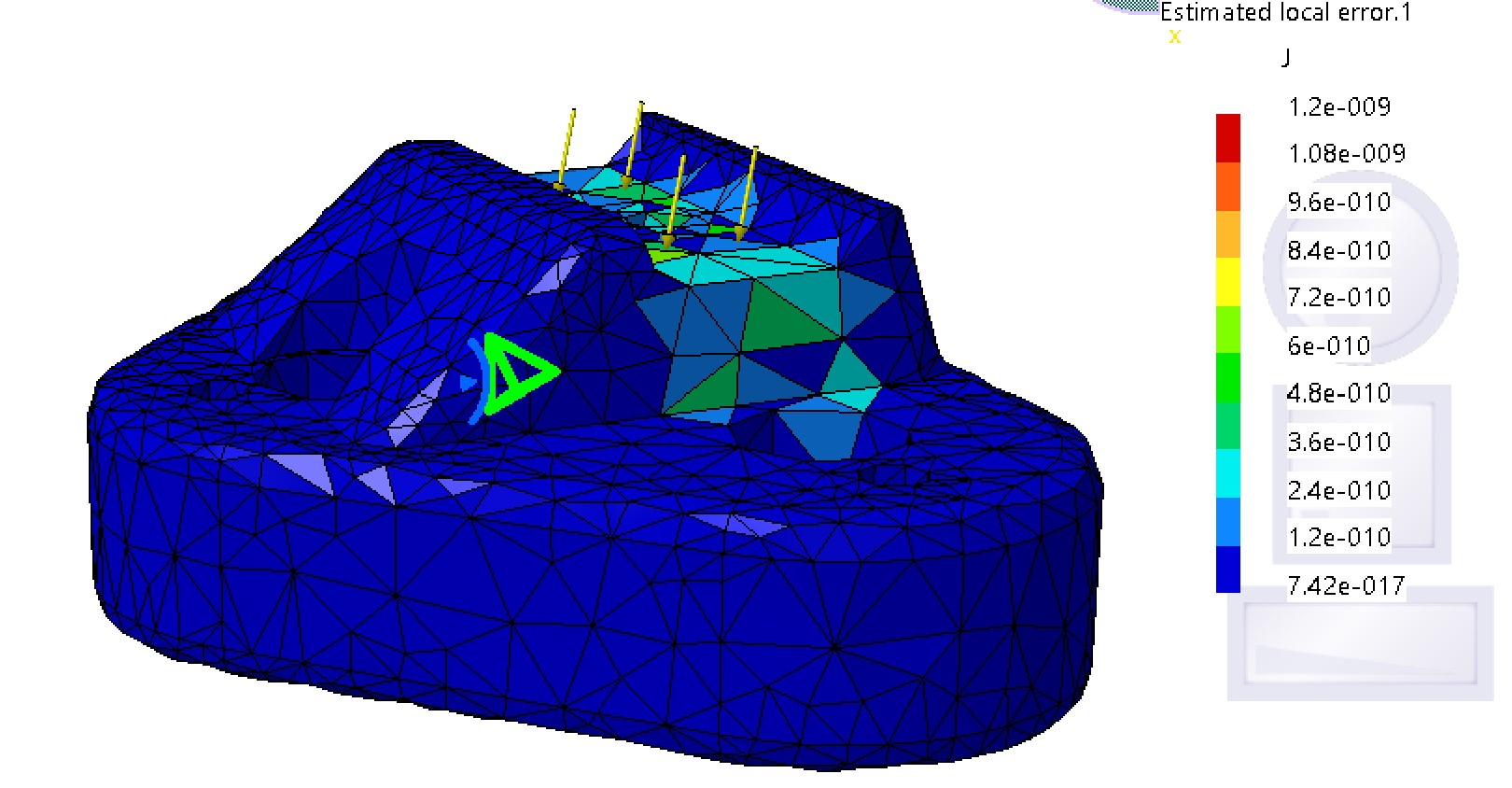
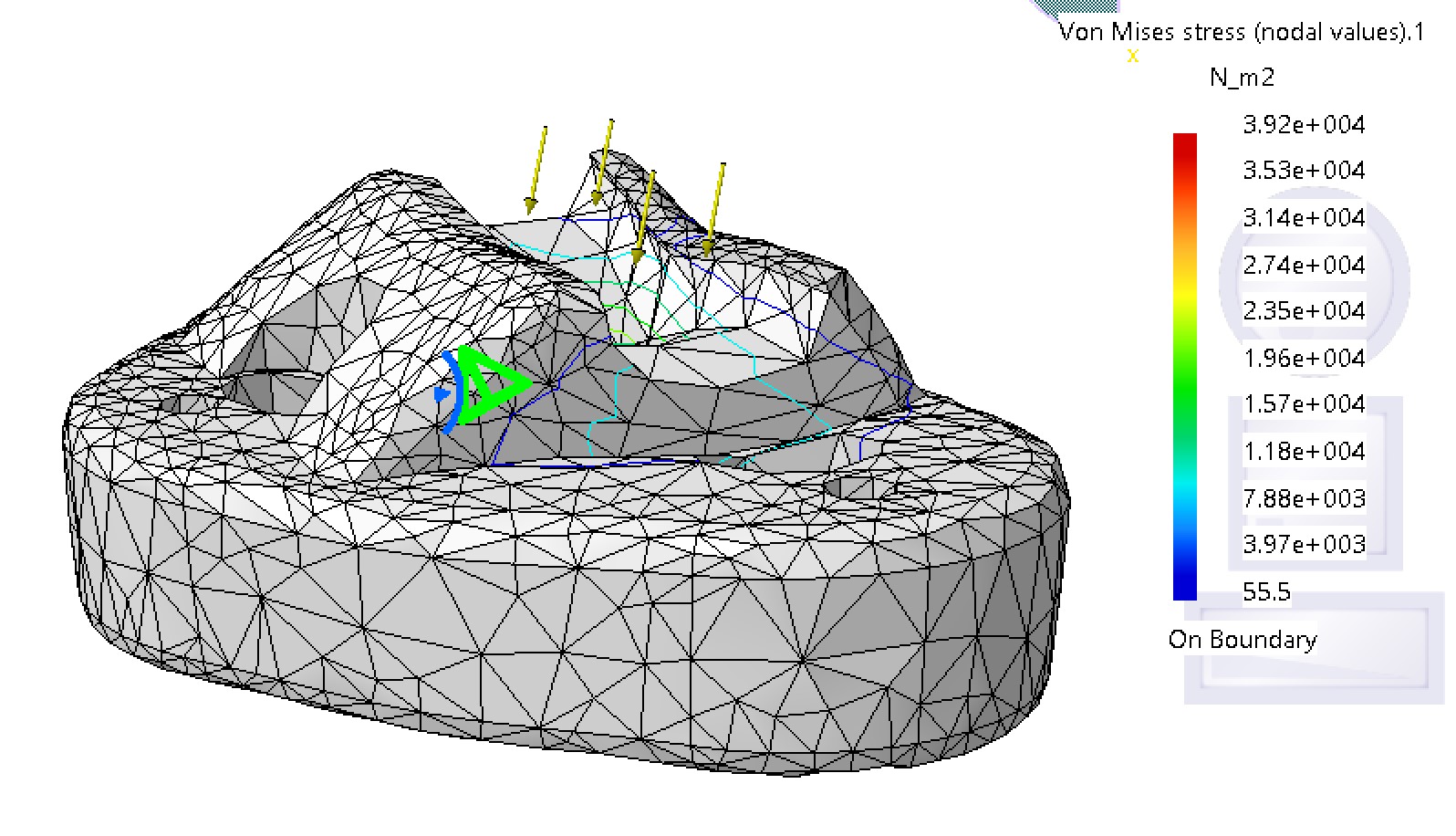
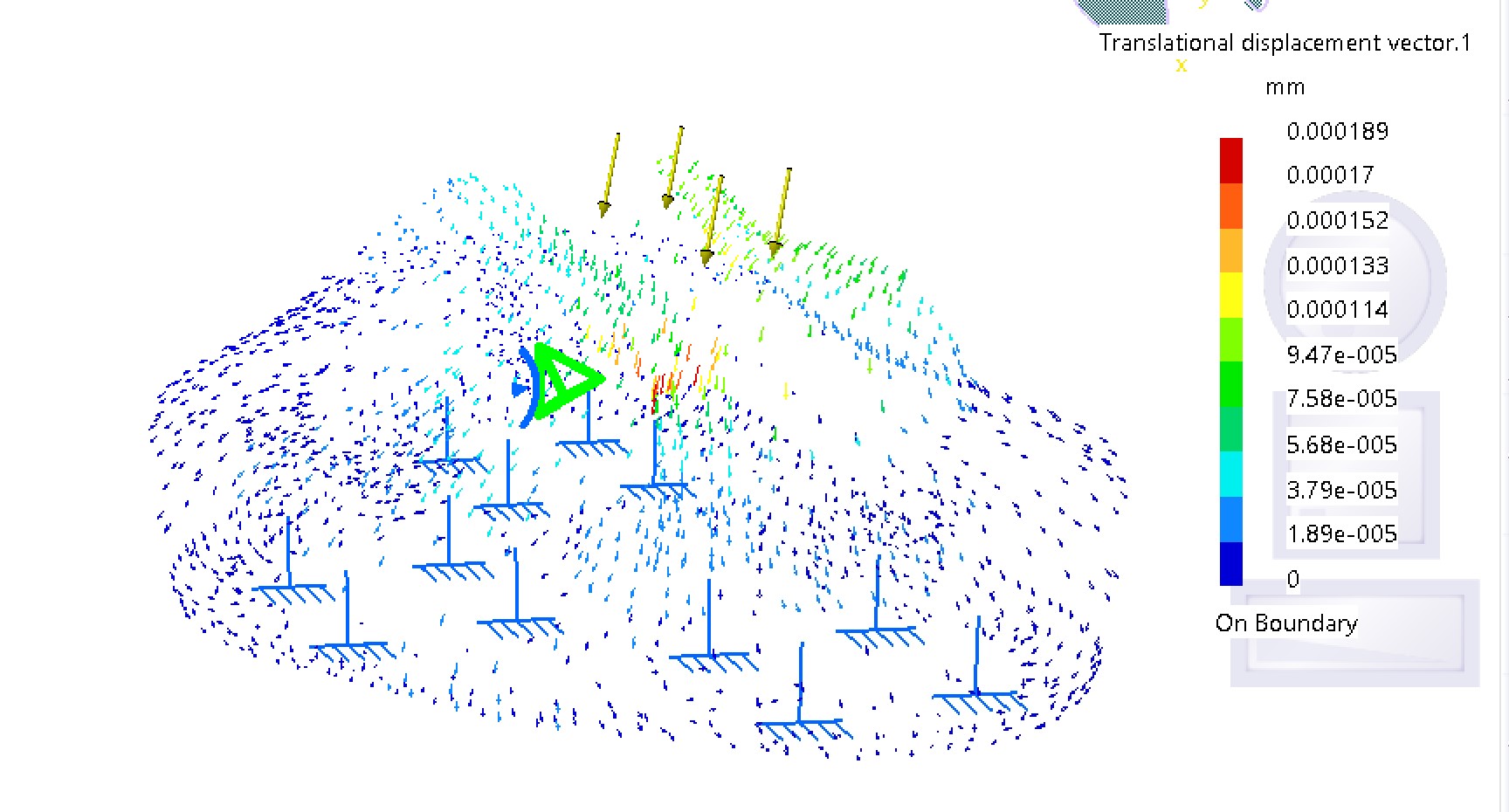
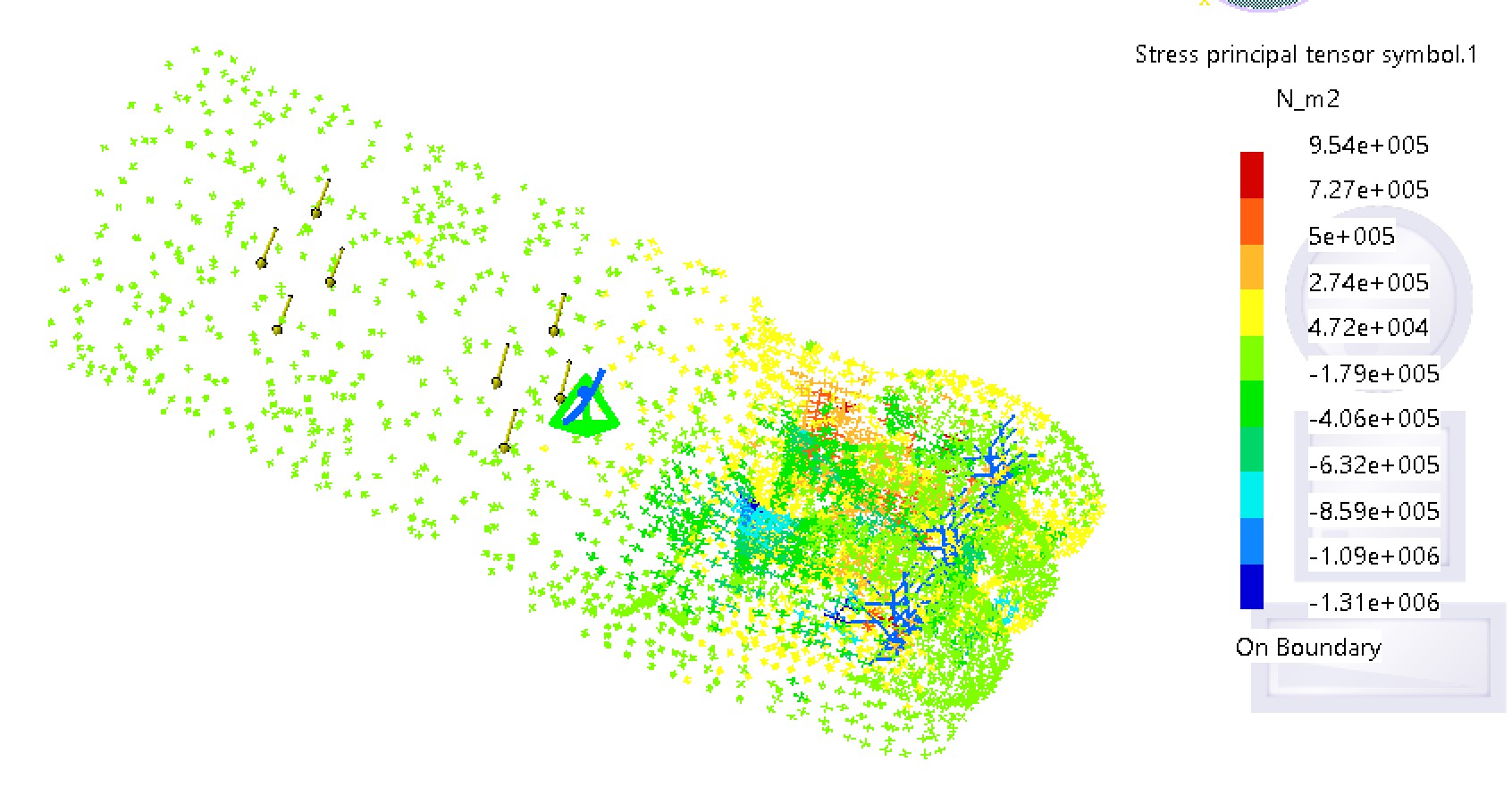
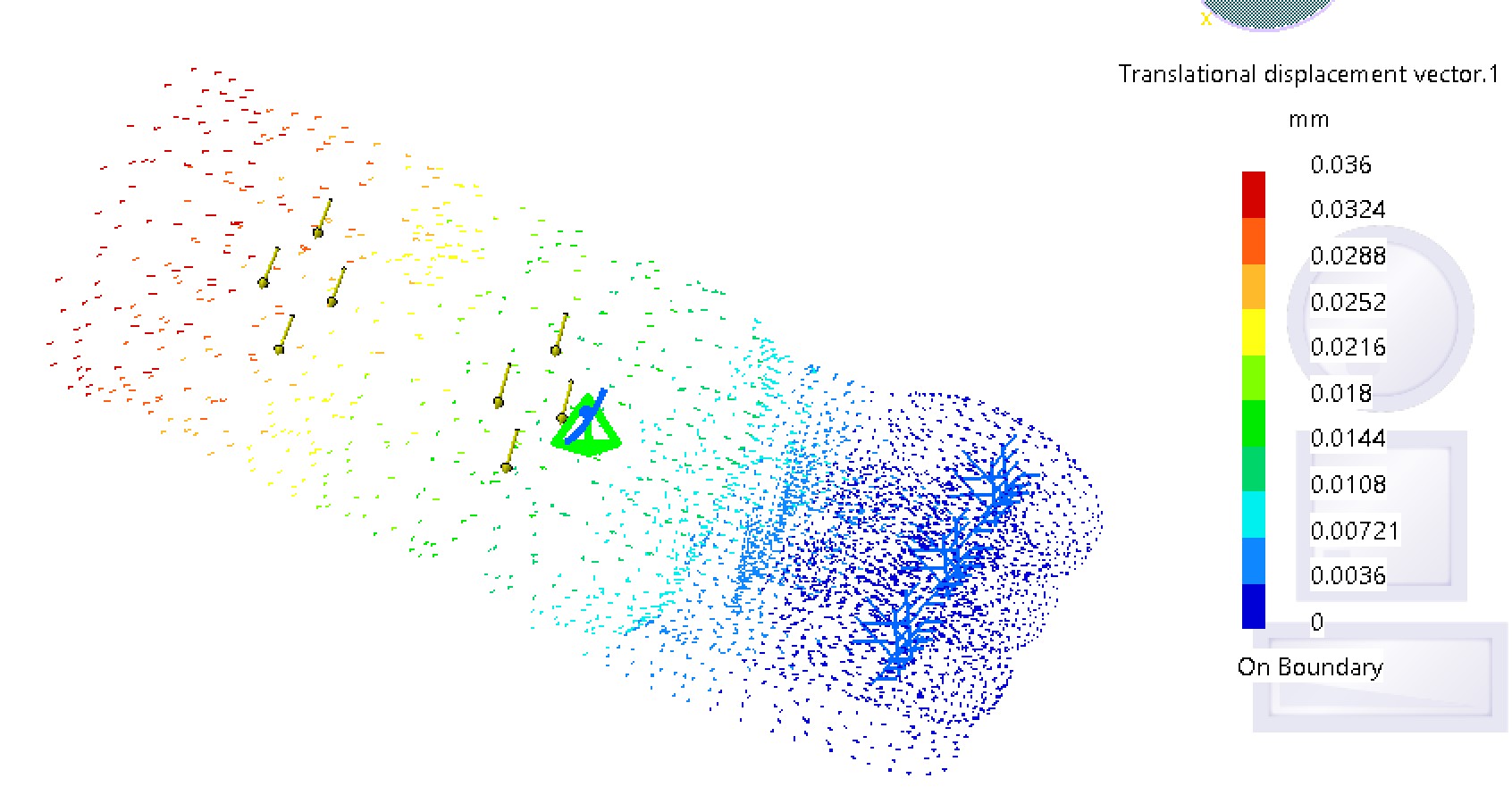
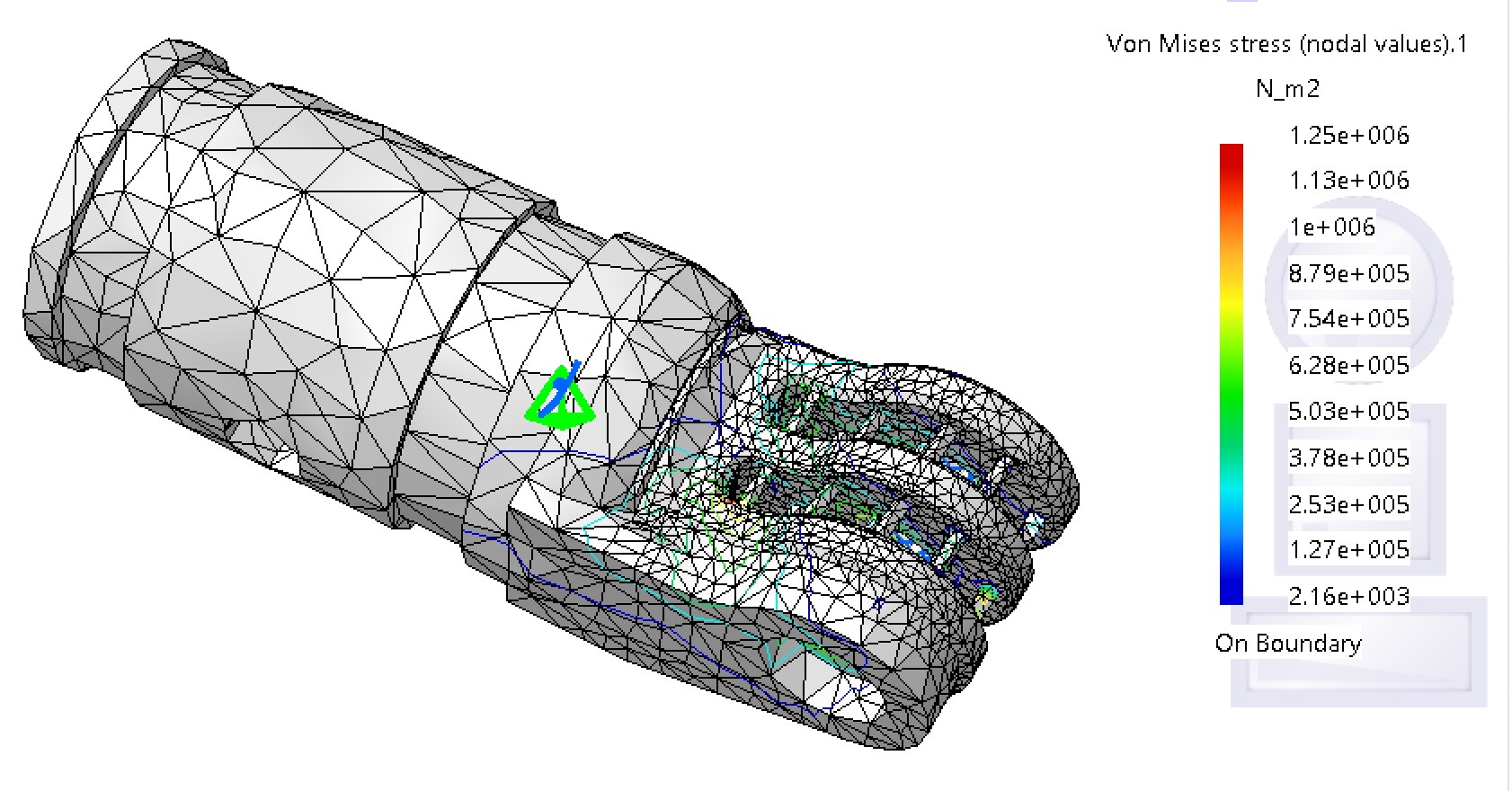
Structure analysis
To ensure the safety and stability of the tripod, it is crucial to analyze the forces it needs to withstand at each attachment point to the luggage rack and the camera itself. The tripod is composed of three 50 cm long aluminum legs, each having a 30-degree angle with the others. The camera, weighing 160 grams, is installed at the tip of the tripod. The tripod is mounted on a motorcycle that can reach speeds of up to 120 km/h and adheres to safety standards regarding the supported G-forces.
At each of the attachment points to the luggage rack, the tripod must withstand the following forces:
Vertical forces: These are mainly caused by the weight of the camera and the tripod itself. The tripod must be able to support the combined weight without deforming or breaking.
Lateral forces: These are generated by the motorcycle’s movement and possible wind resistance while riding at high speeds. The tripod must be sturdy enough to resist these forces and maintain its position without swaying.
Dynamic forces: These are the forces resulting from accelerations, decelerations, and changes in direction while the motorcycle is in motion. The tripod must be able to handle these dynamic forces without compromising its stability or the safety of the rider.
At the camera attachment point, the tripod must withstand:
Gravitational force: Due to the camera’s weight, the tripod must hold the camera securely without allowing it to move or fall during the ride.
Vibrational forces: While the motorcycle is in motion, vibrations can be transmitted through the tripod to the camera. The tripod should be designed to minimize these vibrations to ensure stable and clear footage.
By considering these forces and designing the tripod accordingly, it will provide a safe and stable platform for capturing 360-degree footage during motorcycle rides. The tripod must adhere to safety standards regarding supported G-forces to ensure the security of both the camera equipment and the motorcyclist.
| Variable | Description | Formula |
|---|---|---|
| W | Weight of the camera | W = m * g |
| α | Angle of inclination | (depends on the motorcycle’s position) |
| v | Motorcycle’s velocity | (depends on the motorcycle’s speed) |
| r | Radius of curvature | (depends on the curve being traveled) |
| F_c | Centripetal force | F_c = (m_total * v^2) / r |
| F” | Updated general force | F” = F’ + F_c |
| F_system” | Total force on the system | F_system” = F” + W |
| F_leg” | Force on each leg | F_leg” = F_system” / 3 |
| θ | Angle with vertical axis | θ = 360° / 3 |
| Fv” | Vertical force on each leg | Fv” = F_leg” * cos(120°) |
| Fh” | Horizontal force on each leg | Fh” = F_leg” * sin(120°) |
In my calculations for the forces acting on each leg of the tripod system, I use the term “m_total.” This represents the total mass of the entire system, which includes the mass of the camera, the mass of the tripod, and any additional mass associated with the mounting hardware or other components of the system. It is used to accurately calculate the centripetal force acting on the system when your motorcycle is moving along a curved path.
When I perform my calculations to ensure the safety and durability of the product, I take into account the actual value for m_total, based on the mass of the camera, tripod, and any additional components. By using the correct m_total value, I can precisely calculate the forces acting on each leg of the tripod under different riding conditions.
| Velocity (km/h) | Inclination Angle (°) | Radius of Curvature (m) | F_leg” (N) | Fv” (N) | Fh” (N) |
|---|---|---|---|---|---|
| 30 | 0 | 100 | 6.74 | 3.37 | -5.84 |
| 30 | 0 | 200 | 3.62 | 1.81 | -3.13 |
| 30 | 10 | 100 | 6.74 | 2.24 | -6.03 |
| 45 | 0 | 100 | 15.36 | 7.68 | -13.27 |
| 45 | 20 | 300 | 8.25 | 2.06 | -8.06 |
| 60 | 0 | 400 | 5.43 | 2.71 | -4.69 |
| 75 | 30 | 500 | 8.65 | 1.73 | -8.05 |
| 90 | 0 | 600 | 4.06 | 2.03 | -3.50 |
| 90 | 40 | 700 | 6.77 | 0.90 | -6.62 |
| 105 | 0 | 800 | 3.19 | 1.60 | -2.75 |
| 120 | 0 | 900 | 2.56 | 1.28 | -2.21 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}